パラレルロボットのコンセプトは、1965年に飛行シミュレーション運転に使用されたStewardプラットフォームをベースに、1978年にオーストラリアの著名な機関教授であるHuntが提唱したものである。現在、多くの専門家や学者がこの分野で多くの理論的、実用的な研究を行っています。
パラレルロボットはシリアルロボットに比べ、剛性が高い、荷重重量比が大きい、荷重分布が均一、位置誤差が蓄積しない、力のフィードバックが容易などの利点があります。高精度、大荷重、比較的小さな作業スペースが要求される場面に適しています。
同時に、空気圧機器の性能と機能の大幅な向上により、電子、材料、制御理論、センサーなどの科学技術の発展に伴い、電子制御式圧力調整器制御技術も急速に向上してきました。比例/サーボ制御弁を核心とする電子制御圧力調整器制御システムは、圧力と流量の連続変化の高精度制御に達することができ、自動化設備の柔軟な生産要求を満たすことができます。パラレルロボットへの空気圧駆動の適用を可能にします。
代表的な6自由度パラレルロボットのスチュワード台を例にとると、その構造は下図のようになります。
構造は上下のフラットジョイントで構成され、フラットジョイントは両端にボールジョイントを持つ伸縮自在の連結棒で連結され、上部プラットフォームが3次元空間内で移動・回転できるようになっています。パラレルロボットの多くは、動作用アクチュエーターとしてスクリューロッドや電気油圧式サーボシリンダーを使用している。パラレルロボットの駆動部間の運動は互いに独立できないため、非常に厳密な組み合わせの関係を維持する必要がある。また、いずれかのリンクの運動誤差が生じると制御不能に陥る。本研究では、パラレルロボットのアクチュエータの伝達媒体として、油圧制御の圧力調整器を、より耐性の高い電子制御の圧力調整器に置き換えた。
全体の制御フローパスを下図に示します。
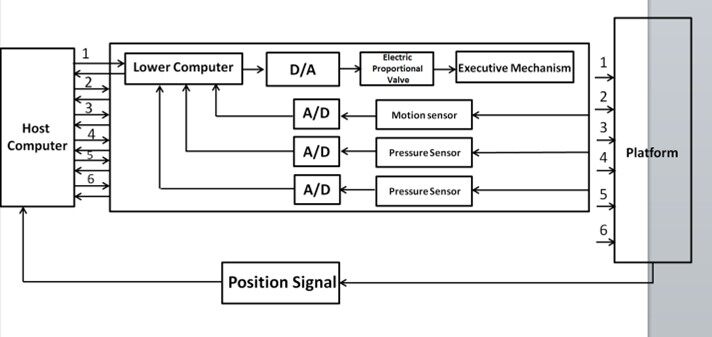
1.シリンダの伸長位置は、上位コンピュータのアナログソルバーで求められ、下位コンピュータに伝送される。
2.下部のコンピュータはD/Aカードを通して電圧(0〜10v)に変換し、電子制御式圧力調整器に出力する。
3.電子制御圧力調整器は、電圧の大きさに応じて開度の大きさと方向を制御し、正確なガス流量をシリンダーに出力してピストンの動きを促します。
4.ピストンの移動位置は変位センサで検出し,変位センサのフィードバック電圧をA/Dカードを通して下部のコンピュータに出力する。ピストンの両端のガス圧は空気圧センサで検出し,フィードバック電圧をA/Dカードを通して下部のコンピュータに出力する。
5.下部コンピュータがフィードバック値に応じてリアルタイムに電気比例弁の制御電圧を調整し、シリンダが正確に位置に到達できるようにします。6.6.プラットフォームの位置信号は、位置センサによって上部コンピュータにフィードバックされ、さらに上部コンピュータによってプラットフォームの位置が補正される。
制御プロセス全体では、単気筒制御システムに焦点が当てられている。単気筒制御システムの実験模式図を下図に示す。
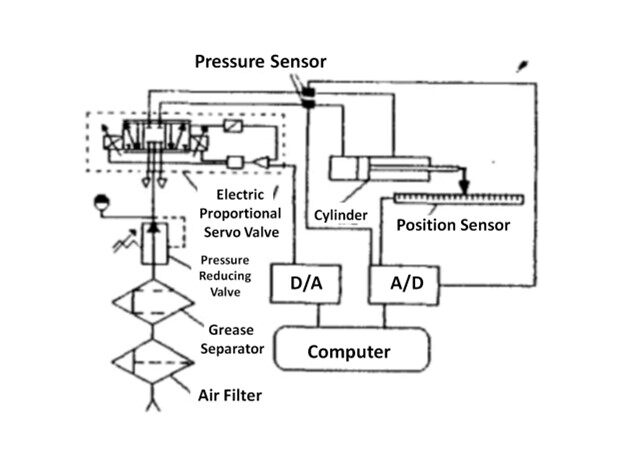
電子制御式圧力調整器制御システムでは、状態単気筒制御の方が制御特性が良い。最適状態フィードバックでPI制御を加えることで、システムの剛性を大幅に向上させ、システムの追従性能を向上させることができる。0.1Hzから5Hzの周波数範囲において、良好な追従性能を有している。今回の試験対象は、自動車用サスペンションシステムの試験台モデルで、あまり高い変位精度を必要とせず、速度や加速度の応答速度に敏感なモデルです。大型シリンダーを採用したことで、システム全体の負荷が大幅に増加。システムの周波数応答は5~10Hzに達することができ、テストプラットフォームの要求を満たすことができる。
シリンダと電気比例弁を主体とした6自由度パラレルプラットフォームを採用し、油圧とスクリューロッドが要求する6つのアクチュエータの厳格な運動組み合わせ関係による制御の難しさを回避し、速度・加速度応答感度を確保しました。エアシリンダーと電子制御圧力調整器の同時使用により、コスト、騒音、公害の大幅な低減が可能です。